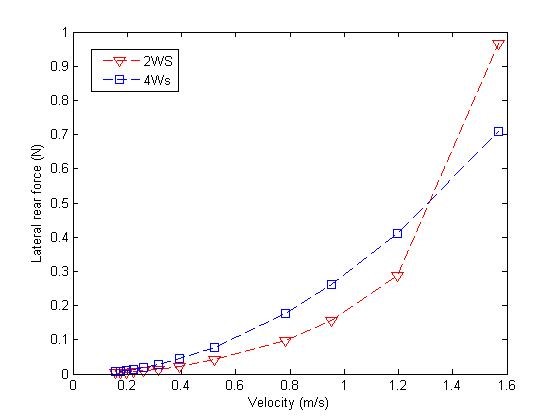
Comparison of lateral rear force between two and four wheel steering in a vehicle with steer by wire system
Mechanical Engineering
DOI:
https://doi.org/10.14331/ijfps.2012.330027Keywords:
SBW, 4WS, 2WS, lateral acceleration, yaw rate, bicycle modelAbstract
One kind of steering systems in vehicles is Steering by Wire (SBW). Control and stability of this method are important issues. In fact the SBW system is very suitable for Four Wheel Steering systems. In this paper the SBW used for Four Wheel Steering system to take result. The effect of 4ws on turning is shown. When a 4ws system turns at low speed, the rear Wheels steer in the opposite direction as the front wheels, so that the maneuverability and parking of the system increases. At higher speed the rear wheels steer in the same direction as the front wheels, so that more stability and less lateral rear force are resulted. In this paper, a bicycle model is used for dynamic modeling for testing the stability and controllability. This model is built with the assumption theorem. Steer by wire is used for steering the rear and front wheels. The lateral rear force is estimated with a Hall Effect sensor.
Downloads
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2012 International Journal of Fundamental Physical Science

This work is licensed under a Creative Commons Attribution 4.0 International License.